-
 202506.12查看详情
202506.12查看详情6月视频集锦|沁峰机器人自动冲压生产线应用案例
3C电子配件、汽车零配件、家电配件、日用品五金等行业自动化冲压生产线的5组应用实例 -
 202506.07查看详情
202506.07查看详情广漂打工到回乡就业,沁峰双职工的故事
如今,沁峰的员工规模已从十余人扩展至四百余人,年产值突破3亿元。企业为当地创造了200多个工人岗位,让许多像詹治平、陈晓春这样的"广漂"夫妻得以回乡就业。 -
 202505.30查看详情
202505.30查看详情粽叶飘香端午至!沁峰祝您端午安康,好运接"粽"而来。
当传统遇上科技,人机携手乐包粽。 -
 202505.22查看详情
202505.22查看详情沁峰助力小家电龙头改造自动化冲压生产线,跑出发展“加速度”
该案例为劳动密集型制造业开辟了一条可复制的自动化升级路径,不仅适用于小家电、五金加工等领域,更为传统制造业的转型升级提供了有益借鉴。 -
 202505.15查看详情
202505.15查看详情最新视频集锦 | 沁峰机器人自动冲压生产线应用案例
沁峰产品在自动化冲压生产线的6组应用实例 -
 202505.15查看详情
202505.15查看详情冲压自动化标杆!沁峰机器人入选湖南省2025年度先进级智能工厂
在技术创新性、产业示范性和经济效益等维度均达到省级标杆水平。 -
 202505.08查看详情
202505.08查看详情沁峰机器人与冲压自动化行业的高频词汇,小编带你入行高端智造业
如果你对冲压机器人行业感兴趣,小编从行业概况、核心技术、岗位需求、职业发展等方面,带你快速入门。 -
 202504.28查看详情
202504.28查看详情劳动节特辑 | 50岁再出发,劳动的价值不由年龄定义
献给所有“在岗、在拼、在发光”的劳动者:你的付出,永远值得被看见。 -
 202504.09查看详情
202504.09查看详情沁峰机器人即将亮相第137届广交会,诚邀全球客户莅临展台交流
沁峰机器人展台在工业自动化及智能制造展区,参展时间为2025年4月15日至4月19日 -
 202504.01查看详情
202504.01查看详情沁峰机器人自动化技术助力厨具制造企业实现产能品质双升级
帮助客户实现了生产流程的高效率、稳定性和可持续性,满足了大批量订单的交付需求。 -
 202504.01查看详情
202504.01查看详情湖南卫视《湖南新闻联播》报道:湖南沁峰机器人
湖南沁峰机器人有限公司总经理贺天玲接受采访 -
 202503.26查看详情
202503.26查看详情沁峰机器人2025春季招聘!智造未来,职等你来!
岗位需求:涵盖模具设计师、学徒工、区域销售、CNC操作员、成本会计、售前工程师等岗位。 联系方式:19918051179 罗女士(微信同号) -
 202503.20查看详情
202503.20查看详情沁峰机器人国际业务宣传片上线 Revolutionize Your Production with QinFeng Robotics
Want faster, smarter, more cost-effective stamping? QinFeng′s got you covered! -
 202503.13查看详情
202503.13查看详情媒体报道|湖南沁峰机器人:以创新驱动智能制造 打造行业标杆企业
华容融媒体中心讯(记者 李芳暄 沈聪)2018年12月,湖南沁峰机器人有限公司入驻华容。该公司作为一家集工业机器人自主研发、生产、销售、服务为一体的高新技术民营企业,不仅以年产值破亿元的亮眼成绩单为地 -
 202503.13查看详情
202503.13查看详情沁峰冲压机器人调试教程更新了!标准运行模式全面讲解
提供详细的操作指南和视频教程,以帮助用户快速掌握沁峰智能摆臂式机器人的调试技能 -
 202503.08查看详情
202503.08查看详情工业机器人制造的“她力量”:平凡岗位上的不凡光芒
在这个特别的节日里,让我们向所有在制造业中奋斗的女性致敬,感谢她们为行业发展和社会进步所做出的贡献!致敬“她力量”,沁峰集团祝全体女性员工三八妇女节快乐,愿你成为更好的自己! -
 202502.27查看详情
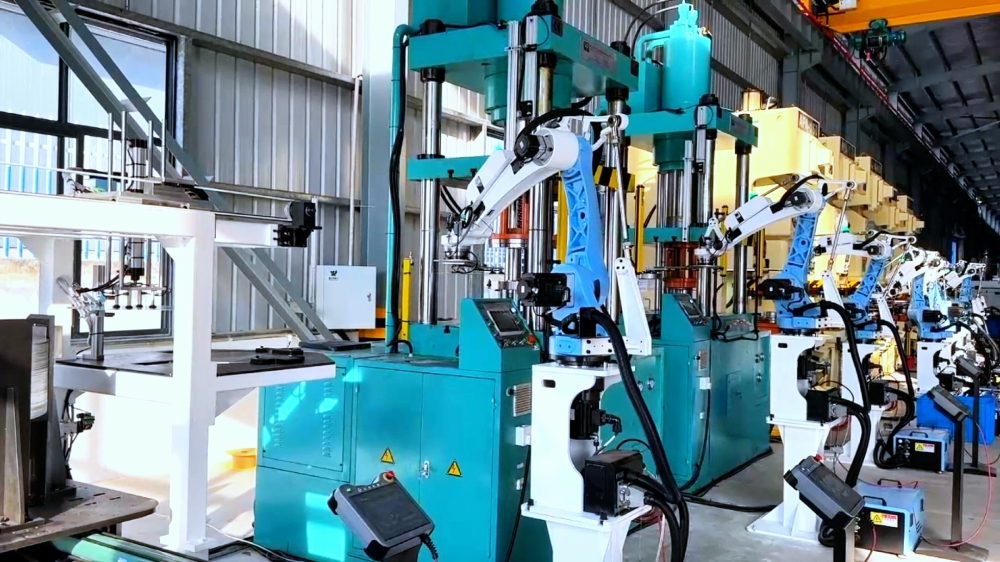
202502.27查看详情多工位冲压搬运自动化供应商-沁峰集团子公司沁恩
沁峰集团子公司-湖南沁恩智能科技有限公司,专注于多工位冲压搬运自动化设备的设计、生产、销售和服务。致力于为客户提供高效、智能、安全的自动化解决方案。 -
 202502.19查看详情
202502.19查看详情生产工业机器人的车间长啥样?一镜到底带您沉浸式体验参观沁峰
冲压机器人细分赛道国家专精特新小巨人企业 -
 202501.24查看详情
202501.24查看详情春节放假无忧,应急保障热线全程在
春节放假期间,如有紧急售后支持需求,请联系当地售后经理,或拨打服务热线19118098011,我们将竭诚为您服务。 -
 202501.17查看详情
202501.17查看详情沁峰助力改造汽车零配件冲压生产线,实现24小时无人化全速生产模式
汽车零配件企业通过产业自动化赋能,达成从“手工操作”到“机器换人”的关键性变革,以提升整体竞争力和可持续发展能力。